25秋深度学习训练营-第2周:卷积神经网络
第2周:卷积神经网络
学习内容:https://oucai.club/classes/dl/week01#第2周-卷积神经网络
学习视频:https://www.jianguoyun.com/p/Dde3HS8QrKKIBhi2xpEGIAA
视频学习至1小时06分,包括:
- CNN的基本结构:卷积、池化、全连接
代码练习
实验1: 使用 LeNet 对 MNIST 数据集分类
代码见https://oucai.club/classes/dl/week02
Epoch [1/10], Step [100/938], Loss: 0.9421, Accuracy: 70.53%
Epoch [1/10], Step [200/938], Loss: 0.2978, Accuracy: 80.96%
Epoch [1/10], Step [300/938], Loss: 0.1998, Accuracy: 85.28%
Epoch [1/10], Step [400/938], Loss: 0.1483, Accuracy: 87.91%
Epoch [1/10], Step [500/938], Loss: 0.1318, Accuracy: 89.54%
Epoch [1/10], Step [600/938], Loss: 0.1123, Accuracy: 90.72%
Epoch [1/10], Step [700/938], Loss: 0.0962, Accuracy: 91.64%
Epoch [1/10], Step [800/938], Loss: 0.1050, Accuracy: 92.31%
Epoch [1/10], Step [900/938], Loss: 0.0876, Accuracy: 92.84%
Test Loss: 0.0854, Test Accuracy: 97.36%
Epoch [2/10], Step [100/938], Loss: 0.0724, Accuracy: 97.58%
Epoch [2/10], Step [200/938], Loss: 0.0759, Accuracy: 97.56%
Epoch [2/10], Step [300/938], Loss: 0.0701, Accuracy: 97.63%
Epoch [2/10], Step [400/938], Loss: 0.0674, Accuracy: 97.72%
Epoch [2/10], Step [500/938], Loss: 0.0710, Accuracy: 97.73%
Epoch [2/10], Step [600/938], Loss: 0.0669, Accuracy: 97.77%
Epoch [2/10], Step [700/938], Loss: 0.0625, Accuracy: 97.82%
Epoch [2/10], Step [800/938], Loss: 0.0561, Accuracy: 97.88%
Epoch [2/10], Step [900/938], Loss: 0.0608, Accuracy: 97.91%
Test Loss: 0.0484, Test Accuracy: 98.39%
Epoch [3/10], Step [100/938], Loss: 0.0442, Accuracy: 98.55%
Epoch [3/10], Step [200/938], Loss: 0.0591, Accuracy: 98.39%
Epoch [3/10], Step [300/938], Loss: 0.0406, Accuracy: 98.51%
Epoch [3/10], Step [400/938], Loss: 0.0455, Accuracy: 98.55%
Epoch [3/10], Step [500/938], Loss: 0.0498, Accuracy: 98.51%
Epoch [3/10], Step [600/938], Loss: 0.0424, Accuracy: 98.51%
Epoch [3/10], Step [700/938], Loss: 0.0452, Accuracy: 98.52%
Epoch [3/10], Step [800/938], Loss: 0.0542, Accuracy: 98.49%
Epoch [3/10], Step [900/938], Loss: 0.0410, Accuracy: 98.50%
Test Loss: 0.0415, Test Accuracy: 98.62%
Epoch [4/10], Step [100/938], Loss: 0.0353, Accuracy: 98.89%
Epoch [4/10], Step [200/938], Loss: 0.0337, Accuracy: 98.92%
Epoch [4/10], Step [300/938], Loss: 0.0398, Accuracy: 98.90%
Epoch [4/10], Step [400/938], Loss: 0.0357, Accuracy: 98.89%
Epoch [4/10], Step [500/938], Loss: 0.0416, Accuracy: 98.84%
Epoch [4/10], Step [600/938], Loss: 0.0442, Accuracy: 98.80%
Epoch [4/10], Step [700/938], Loss: 0.0336, Accuracy: 98.80%
Epoch [4/10], Step [800/938], Loss: 0.0319, Accuracy: 98.85%
Epoch [4/10], Step [900/938], Loss: 0.0400, Accuracy: 98.84%
Test Loss: 0.0440, Test Accuracy: 98.60%
Epoch [5/10], Step [100/938], Loss: 0.0287, Accuracy: 99.17%
Epoch [5/10], Step [200/938], Loss: 0.0251, Accuracy: 99.23%
Epoch [5/10], Step [300/938], Loss: 0.0291, Accuracy: 99.18%
Epoch [5/10], Step [400/938], Loss: 0.0275, Accuracy: 99.18%
Epoch [5/10], Step [500/938], Loss: 0.0351, Accuracy: 99.09%
Epoch [5/10], Step [600/938], Loss: 0.0325, Accuracy: 99.07%
Epoch [5/10], Step [700/938], Loss: 0.0320, Accuracy: 99.05%
Epoch [5/10], Step [800/938], Loss: 0.0337, Accuracy: 99.03%
Epoch [5/10], Step [900/938], Loss: 0.0245, Accuracy: 99.06%
Test Loss: 0.0468, Test Accuracy: 98.52%
Epoch [6/10], Step [100/938], Loss: 0.0277, Accuracy: 99.05%
Epoch [6/10], Step [200/938], Loss: 0.0258, Accuracy: 99.11%
Epoch [6/10], Step [300/938], Loss: 0.0264, Accuracy: 99.14%
Epoch [6/10], Step [400/938], Loss: 0.0229, Accuracy: 99.18%
Epoch [6/10], Step [500/938], Loss: 0.0194, Accuracy: 99.23%
Epoch [6/10], Step [600/938], Loss: 0.0277, Accuracy: 99.19%
Epoch [6/10], Step [700/938], Loss: 0.0233, Accuracy: 99.20%
Epoch [6/10], Step [800/938], Loss: 0.0238, Accuracy: 99.20%
Epoch [6/10], Step [900/938], Loss: 0.0288, Accuracy: 99.18%
Test Loss: 0.0554, Test Accuracy: 98.28%
Epoch [7/10], Step [100/938], Loss: 0.0193, Accuracy: 99.28%
Epoch [7/10], Step [200/938], Loss: 0.0249, Accuracy: 99.28%
Epoch [7/10], Step [300/938], Loss: 0.0211, Accuracy: 99.33%
Epoch [7/10], Step [400/938], Loss: 0.0196, Accuracy: 99.37%
Epoch [7/10], Step [500/938], Loss: 0.0257, Accuracy: 99.30%
Epoch [7/10], Step [600/938], Loss: 0.0226, Accuracy: 99.30%
Epoch [7/10], Step [700/938], Loss: 0.0212, Accuracy: 99.30%
Epoch [7/10], Step [800/938], Loss: 0.0267, Accuracy: 99.29%
Epoch [7/10], Step [900/938], Loss: 0.0181, Accuracy: 99.30%
Test Loss: 0.0441, Test Accuracy: 98.65%
Epoch [8/10], Step [100/938], Loss: 0.0145, Accuracy: 99.50%
Epoch [8/10], Step [200/938], Loss: 0.0164, Accuracy: 99.48%
Epoch [8/10], Step [300/938], Loss: 0.0179, Accuracy: 99.46%
Epoch [8/10], Step [400/938], Loss: 0.0161, Accuracy: 99.44%
Epoch [8/10], Step [500/938], Loss: 0.0165, Accuracy: 99.44%
Epoch [8/10], Step [600/938], Loss: 0.0177, Accuracy: 99.45%
Epoch [8/10], Step [700/938], Loss: 0.0211, Accuracy: 99.43%
Epoch [8/10], Step [800/938], Loss: 0.0210, Accuracy: 99.41%
Epoch [8/10], Step [900/938], Loss: 0.0194, Accuracy: 99.41%
Test Loss: 0.0316, Test Accuracy: 99.08%
Epoch [9/10], Step [100/938], Loss: 0.0100, Accuracy: 99.69%
Epoch [9/10], Step [200/938], Loss: 0.0136, Accuracy: 99.63%
Epoch [9/10], Step [300/938], Loss: 0.0176, Accuracy: 99.56%
Epoch [9/10], Step [400/938], Loss: 0.0210, Accuracy: 99.50%
Epoch [9/10], Step [500/938], Loss: 0.0144, Accuracy: 99.52%
Epoch [9/10], Step [600/938], Loss: 0.0167, Accuracy: 99.50%
Epoch [9/10], Step [700/938], Loss: 0.0228, Accuracy: 99.46%
Epoch [9/10], Step [800/938], Loss: 0.0197, Accuracy: 99.46%
Epoch [9/10], Step [900/938], Loss: 0.0136, Accuracy: 99.46%
Test Loss: 0.0403, Test Accuracy: 98.86%
Epoch [10/10], Step [100/938], Loss: 0.0097, Accuracy: 99.66%
Epoch [10/10], Step [200/938], Loss: 0.0141, Accuracy: 99.59%
Epoch [10/10], Step [300/938], Loss: 0.0089, Accuracy: 99.63%
Epoch [10/10], Step [400/938], Loss: 0.0187, Accuracy: 99.59%
Epoch [10/10], Step [500/938], Loss: 0.0182, Accuracy: 99.56%
Epoch [10/10], Step [600/938], Loss: 0.0150, Accuracy: 99.55%
Epoch [10/10], Step [700/938], Loss: 0.0113, Accuracy: 99.55%
Epoch [10/10], Step [800/938], Loss: 0.0200, Accuracy: 99.51%
Epoch [10/10], Step [900/938], Loss: 0.0195, Accuracy: 99.50%
Test Loss: 0.0391, Test Accuracy: 98.93%
Best Test Accuracy: 99.08%
经过多轮训练尝试,我们发现第十次的准确度并非最高,反而是第九次的准确度达到了99%以上
为什么不保存最后一轮的模型?
训练过程中,模型性能通常是 “提升→峰值→下降” 的趋势(过拟合):
前几轮:模型学习训练集规律,测试准确率逐步提升; 峰值轮:测试准确率达到最高(泛化能力最强); 后续轮:模型开始 “死记” 训练集(过拟合),训练准确率继续提升,但测试准确率下降。 如果只保存最后一轮的模型,大概率是过拟合的模型;而保存 “最优准确率” 对应的模型,能拿到泛化能力最好的版本。
实验2:MNIST数据集分类(使用参数接近的MLP和CNN分别对MNIST数据集分类)
构建简单的
CNN对mnist数据集进⾏分类。
第一步: 加载数据 (MNIST)
PyTorch里包含了MNIST,CIFAR10等常用数据集,调用torchvision.datasets即可把这些数据由远程下载到本地,MNIST的使用方法如下:
torchvision.datasets.MNIST(root, train=True, transform=None, target_transform=None, download=False)
root 为数据集下载到本地后的根目录,包括 training.pt 和 test.pt 文件
train,如果设置为True,从training.pt创建数据集,否则从test.pt创建。
download,如果设置为True, 从互联网下载数据并放到root文件夹下
transform, 一种函数或变换,输入PIL图片,返回变换之后的数据。
target_transform 一种函数或变换,输入目标,进行变换。
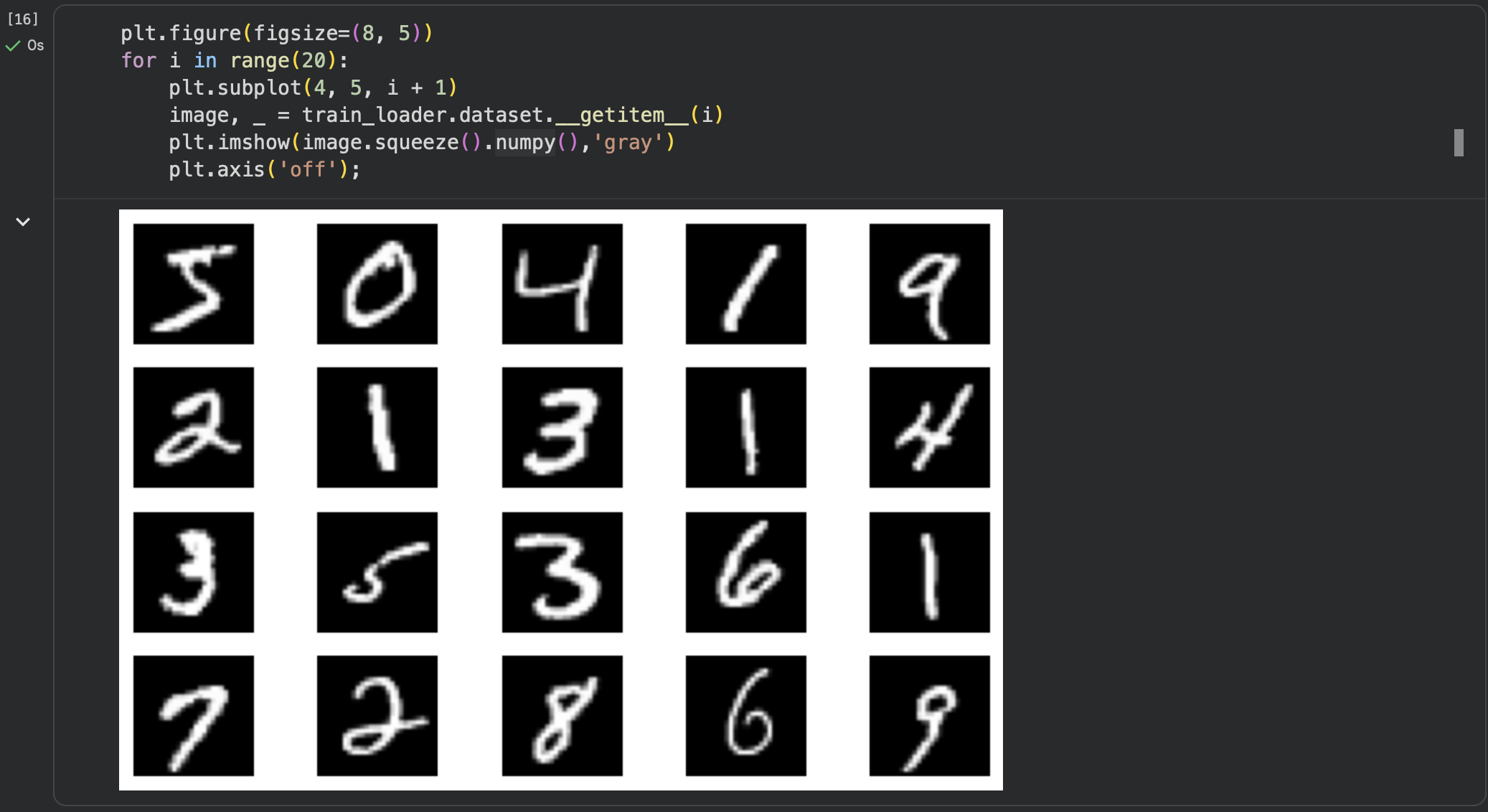
我们在从远程下载 MNIST 数据时将shuffle=True,然而在此处的20张图并没有被打乱顺序。
原因在于这里访问的是:train_loader.dataset(原始数据集 MNIST)
而shuffle发生在DataLoader的batch抓取阶段:

可以看到数据已经被打乱展示
第二步:创建网络
class FC2Layer(nn.Module):
def __init__(self, input_size, n_hidden, output_size):
# nn.Module子类的函数必须在构造函数中执行父类的构造函数# 下式等价于nn.Module.__init__(self)
super(FC2Layer, self).__init__()
self.input_size = input_size
# 这里直接用 Sequential 就定义了网络,注意要和下面 CNN 的代码区分开
self.network = nn.Sequential(
nn.Linear(input_size, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, output_size),
nn.LogSoftmax(dim=1)
)
def forward(self, x):
# view一般出现在model类的forward函数中,用于改变输入或输出的形状
# x.view(-1, self.input_size) 的意思是多维的数据展成二维
# 代码指定二维数据的列数为 input_size=784,行数 -1 表示我们不想算,
# 电脑会自己计算对应的数字
# 在 DataLoader 部分,我们可以看到 batch_size 是64,所以得到 x 的行数是64
# 大家可以加一行代码:print(x.cpu().numpy().shape)
# 训练过程中,就会看到 (64, 784) 的输出,和我们的预期是一致的
# forward 函数的作用是,指定网络的运行过程,这个全连接网络可能看不啥意义
# 下面的CNN网络可以看出 forward 的作用。
x = x.view(-1, self.input_size)
return self.network(x)
class CNN(nn.Module):
def __init__(self, input_size, n_feature, output_size):
# 执行父类的构造函数,所有的网络都要这么写
super(CNN, self).__init__()
# 下面是网络里典型结构的一些定义,一般就是卷积和全连接
# 池化、ReLU一类的不用在这里定义
self.n_feature = n_feature
self.conv1 = nn.Conv2d(in_channels=1, out_channels=n_feature, kernel_size=5)
self.conv2 = nn.Conv2d(n_feature, n_feature, kernel_size=5)
self.fc1 = nn.Linear(n_feature*4*4, 50)
self.fc2 = nn.Linear(50, 10)
# 下面的 forward 函数,定义了网络的结构,按照一定顺序,把上面构建的一些结构组织起来
# 意思就是,conv1, conv2 等等的,可以多次重用
def forward(self, x, verbose=False):
x = self.conv1(x)
x = F.relu(x)
x = F.max_pool2d(x, kernel_size=2)
x = self.conv2(x)
x = F.relu(x)
x = F.max_pool2d(x, kernel_size=2)
x = x.view(-1, self.n_feature*4*4)
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = F.log_softmax(x, dim=1)
return x
# 训练函数
def train(model):
model.train()
# 主里从train_loader里,64个样本一个batch为单位提取样本进行训练
for batch_idx, (data, target) in enumerate(train_loader):
# 把数据送到GPU中
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output, target)
loss.backward()
optimizer.step()
if batch_idx % 100 == 0:
print('Train: [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
def test(model):
model.eval()
test_loss = 0
correct = 0
for data, target in test_loader:
# 把数据送到GPU中
data, target = data.to(device), target.to(device)
# 把数据送入模型,得到预测结果
output = model(data)
# 计算本次batch的损失,并加到 test_loss 中
test_loss += F.nll_loss(output, target, reduction='sum').item()
# get the index of the max log-probability,最后一层输出10个数
# 值最大的那个即对应着分类结果,然后把分类结果保存在 pred 里
pred = output.data.max(1, keepdim=True)[1]
# 将 pred 与 target 相比,得到正确预测结果的数量,并加到 correct 中
# 这里需要注意一下 view_as ,意思是把 target 变成维度和 pred 一样的意思
correct += pred.eq(target.data.view_as(pred)).cpu().sum().item()
test_loss /= len(test_loader.dataset)
accuracy = 100. * correct / len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
accuracy))
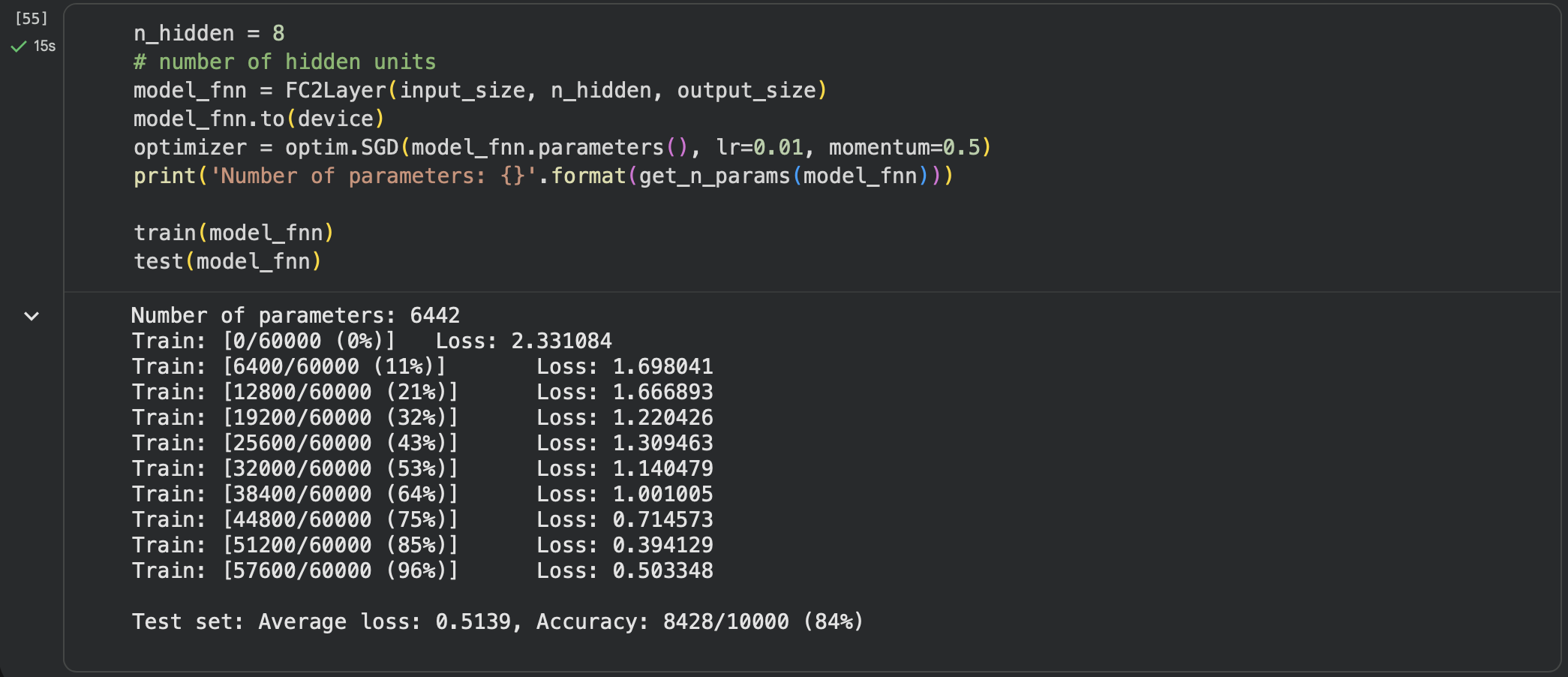
第三步:在小型全连接网络上训练(Fully-connected network)
FNN 前馈神经网络(FeedforwardNeural Network)
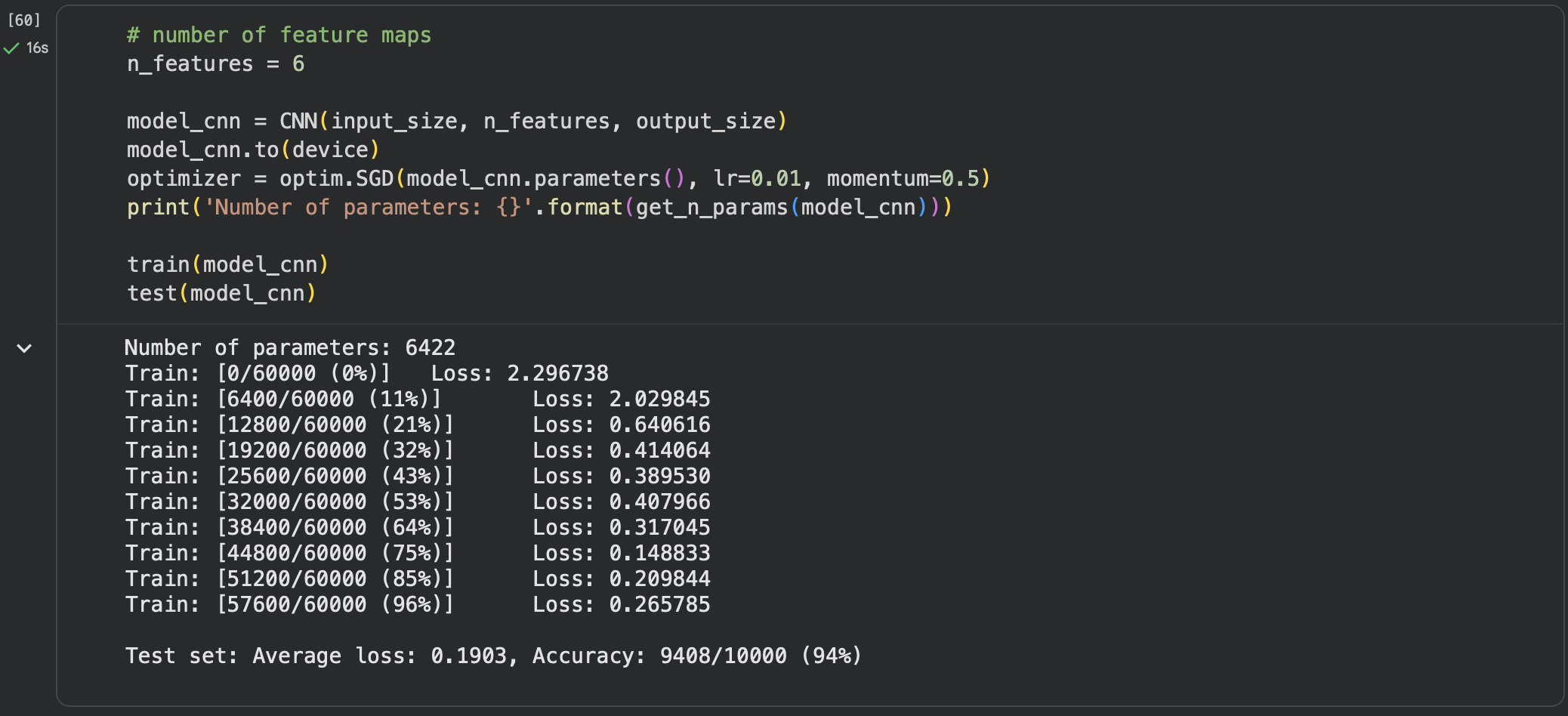
第四步:在卷积神经网络上训练
第五步:打乱像素顺序再次在两个网络上训练与测试
考虑到CNN在卷积与池化上的优良特性,如果我们把图像中的像素打乱顺序,这样卷积和池化就难以发挥作用了,为了验证这个想法,我们把图像中的像素打乱顺序再试试。
首先下面代码展示随机打乱像素顺序后,图像的形态:
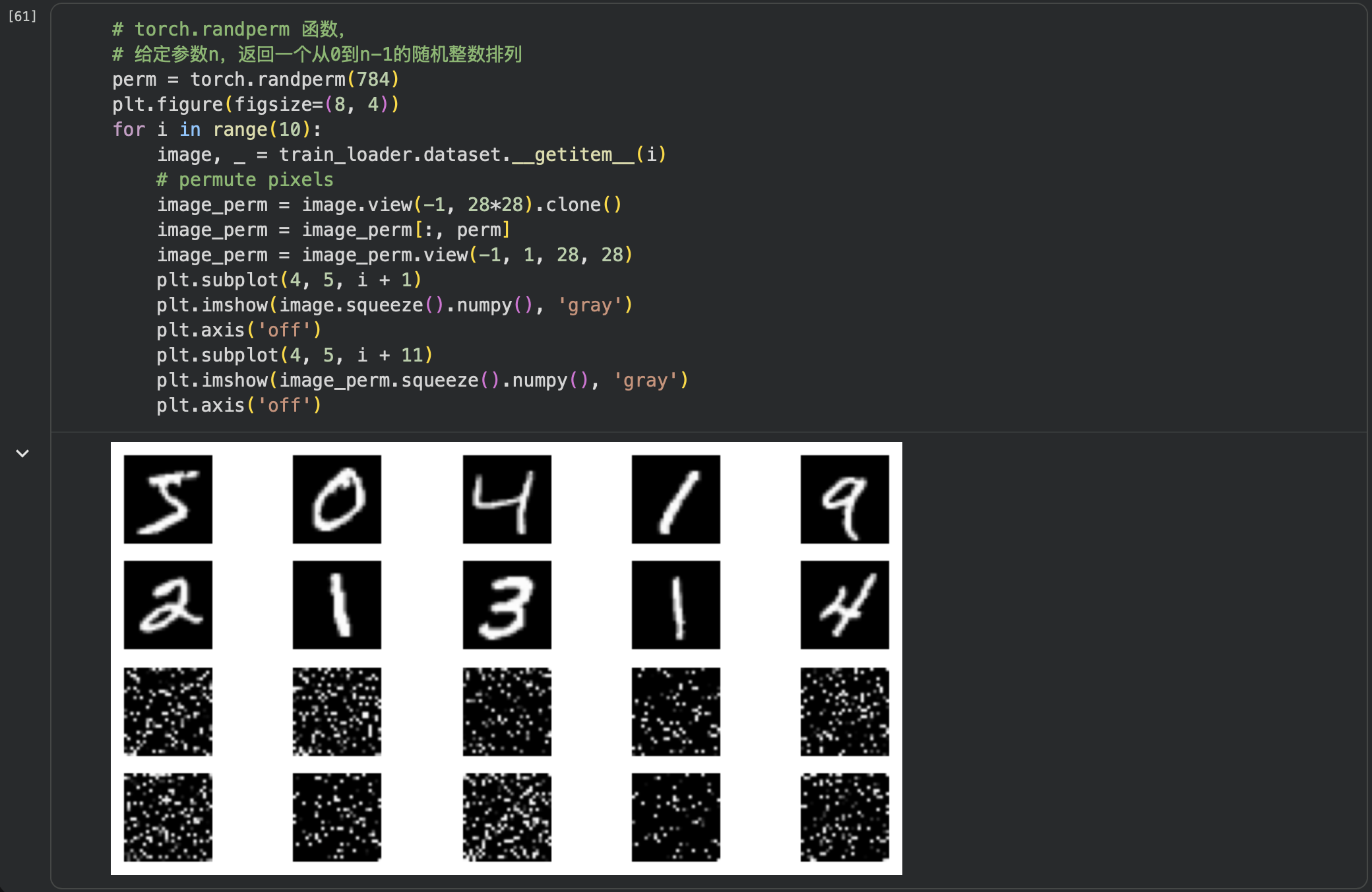
重新定义训练与测试函数,我们写了两个函数 train_perm 和 test_perm,分别对应着加入像素打乱顺序的训练函数与测试函数。
与之前的训练与测试函数基本上完全相同,只是对 data 加入了打乱顺序操作。
# 对每个 batch 里的数据,打乱像素顺序的函数
def perm_pixel(data, perm):
# 转化为二维矩阵
data_new = data.view(-1, 28*28)
# 打乱像素顺序
data_new = data_new[:, perm]
# 恢复为原来4维的 tensor
data_new = data_new.view(-1, 1, 28, 28)
return data_new
# 训练函数
def train_perm(model, perm):
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
# 像素打乱顺序
data = perm_pixel(data, perm)
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output, target)
loss.backward()
optimizer.step()
if batch_idx % 100 == 0:
print('Train: [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
# 测试函数
def test_perm(model, perm):
model.eval()
test_loss = 0
correct = 0
for data, target in test_loader:
data, target = data.to(device), target.to(device)
# 像素打乱顺序
data = perm_pixel(data, perm)
output = model(data)
test_loss += F.nll_loss(output, target, reduction='sum').item()
pred = output.data.max(1, keepdim=True)[1]
correct += pred.eq(target.data.view_as(pred)).cpu().sum().item()
test_loss /= len(test_loader.dataset)
accuracy = 100. * correct / len(test_loader.dataset)
print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
test_loss, correct, len(test_loader.dataset),
accuracy))
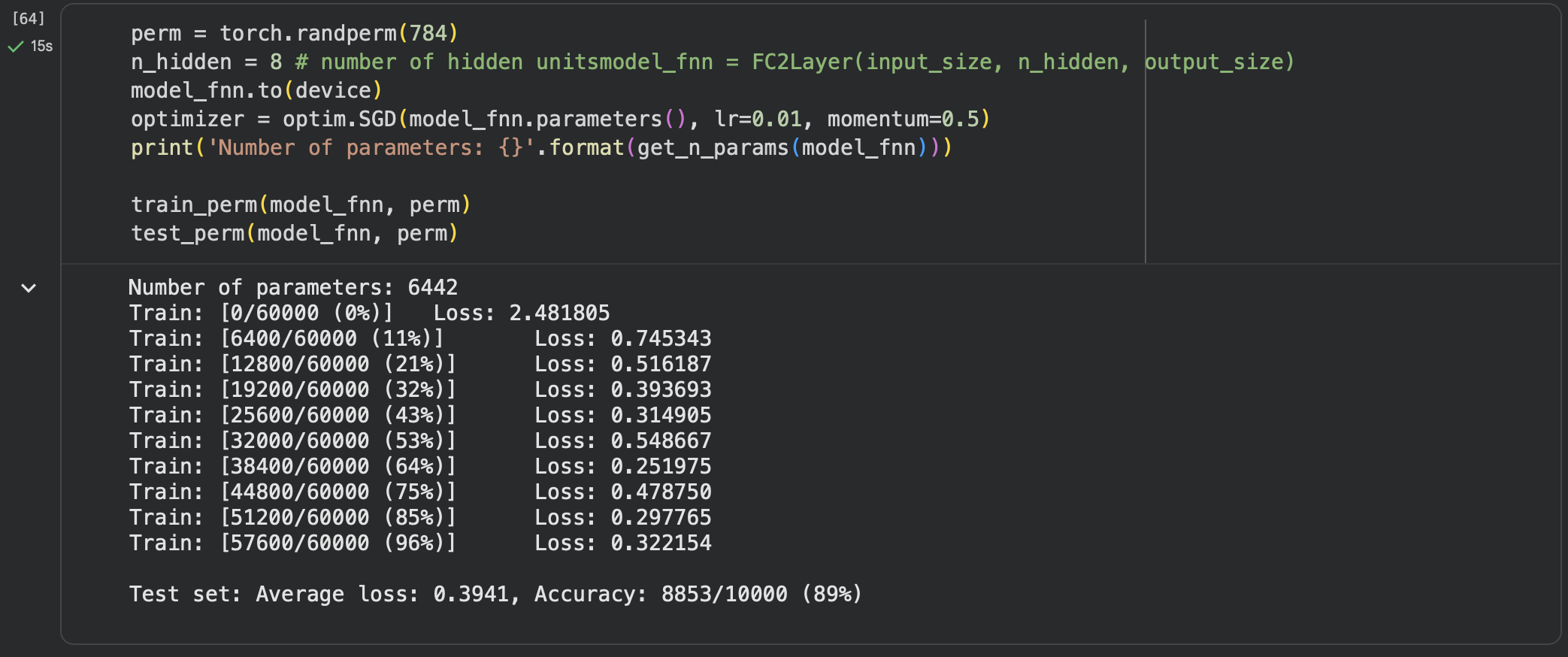
在全连接网络上训练与测试:
在卷积神经网络上训练与测试:
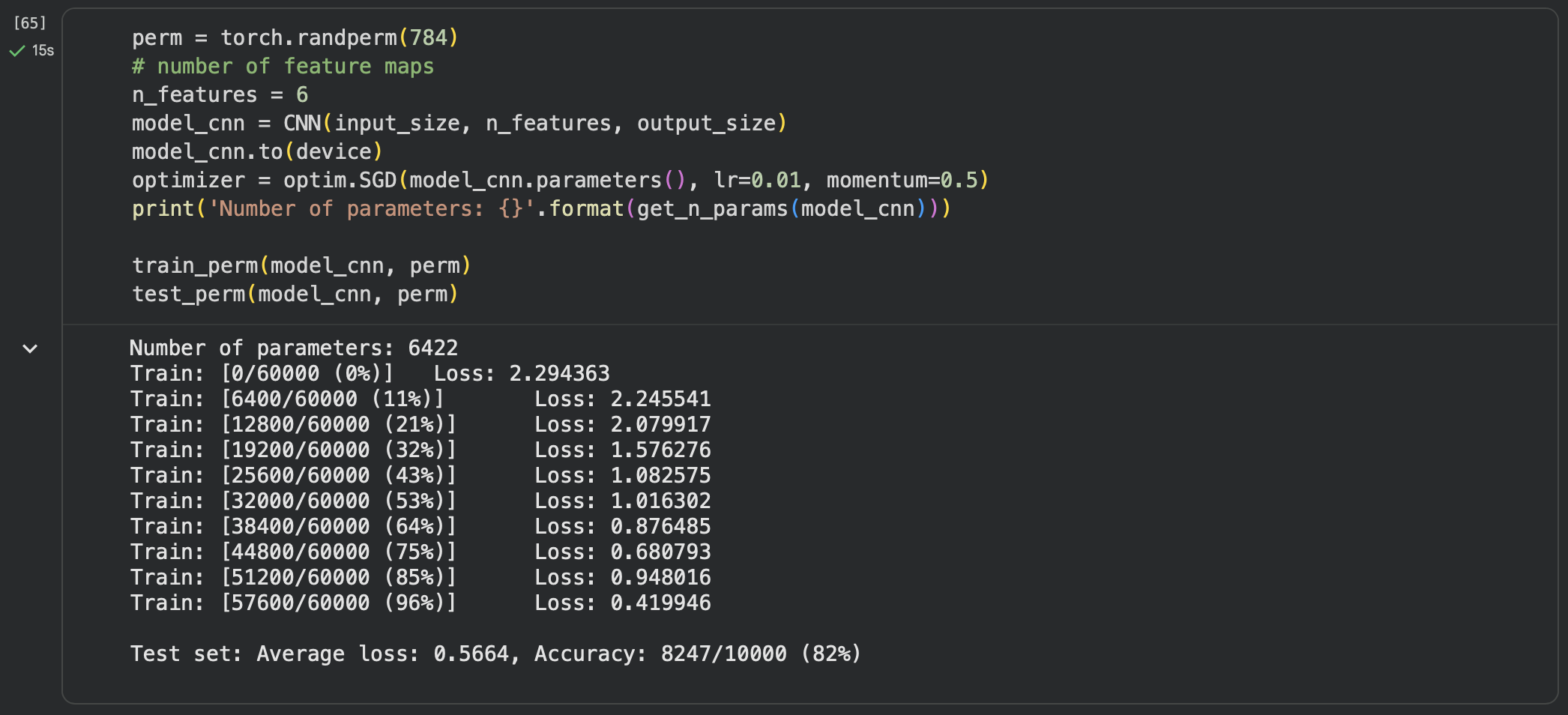
从打乱像素顺序的实验结果来看,全连接网络的性能基本上没有发生变化,但是卷积神经网络的性能明显下降。
这是因为对于卷积神经网络,会利用像素的局部关系,但是打乱顺序以后,这些像素间的关系将无法得到利用。
分析: 以“一定规律”将图片像素打散的方式测试的可行性在于,对每一张图进行了相同的“不规则改动”,这一改动对于图片内容来说是毁灭性的,但是对于
FNN来说,被展平(Flatten)的训练集本身的特征只是进行了排序上的改动,规律并没有被打乱,而对于CNN来说,由于像素顺序的打乱,使得图片本身“看起来的”信息丢失,卷积及池化过程中完全无法获得任何有用的信息,相较于FNN反倒效果变得一般。
实验3:使用VGG对CIFAR10分类
VGG是由Simonyan 和Zisserman在文献《Very Deep Convolutional Networks for Large Scale Image Recognition》中提出卷积神经网络模型,其名称来源于作者所在的牛津大学视觉几何组(Visual Geometry Group)的缩写。该模型参加2014年的 ImageNet图像分类与定位挑战赛,取得了优异成绩:在分类任务上排名第二,在定位任务上排名第一。
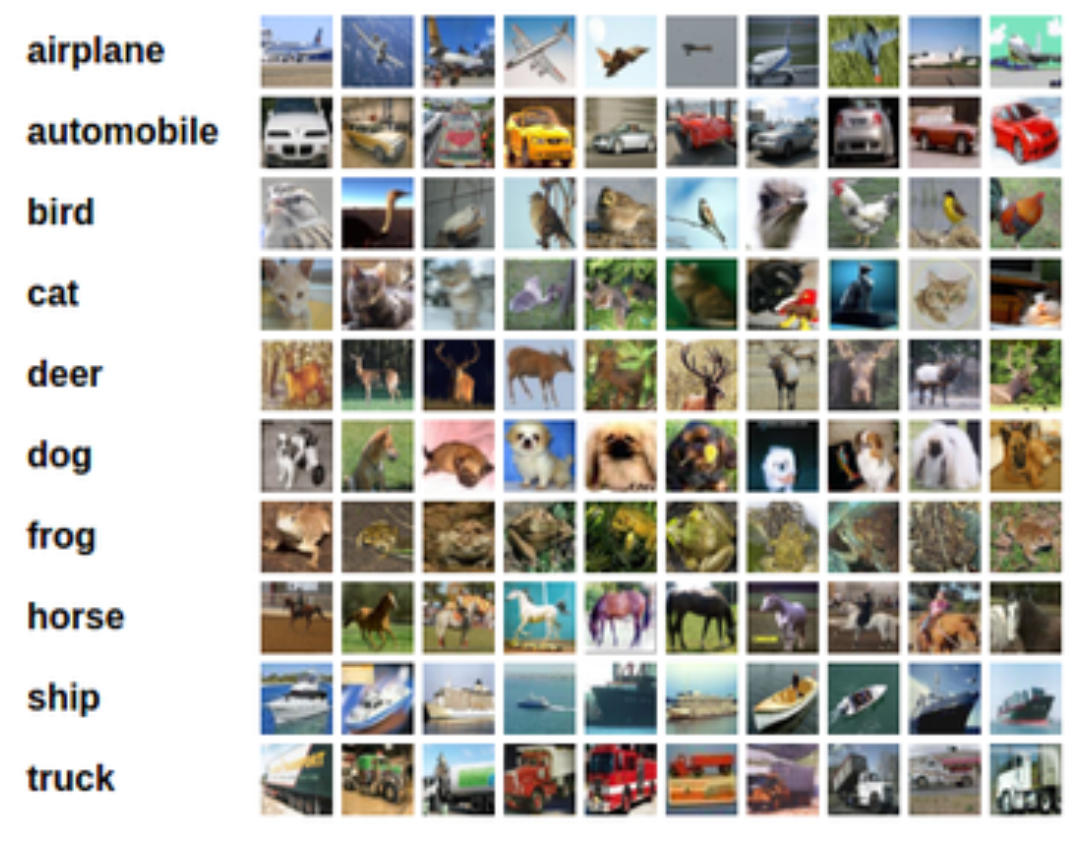
CIFAR10(Canadian Institute for Advanced Research)是深度学习领域最经典的图像分类基准数据集之一,由 Alex Krizhevsky、Vinod Nair 和 Geoffrey Hinton 整理发布,尤其适合入门级计算机视觉算法的训练与测试。CIFAR10 包含 60000 张 32×32 像素的彩色 RGB 图像,分为 50000 张训练集 + 10000 张测试集,图像分辨率较低,计算成本小,适合快速迭代模型。
Epoch 1: 100%|██████████| 391/391 [00:20<00:00, 18.95it/s, Loss=1.42, Acc=47.5]
Test set: Average loss: 1.1123, Accuracy: 6026/10000 (60.26%)
保存最佳模型,准确率: 60.26%
Epoch 2: 100%|██████████| 391/391 [00:19<00:00, 20.53it/s, Loss=0.94, Acc=66.8]
Test set: Average loss: 0.8780, Accuracy: 7031/10000 (70.31%)
保存最佳模型,准确率: 70.31%
Epoch 3: 100%|██████████| 391/391 [00:19<00:00, 20.24it/s, Loss=0.767, Acc=73.1]
Test set: Average loss: 0.7769, Accuracy: 7356/10000 (73.56%)
保存最佳模型,准确率: 73.56%
Epoch 4: 100%|██████████| 391/391 [00:19<00:00, 20.42it/s, Loss=0.662, Acc=77]
Test set: Average loss: 0.6401, Accuracy: 7754/10000 (77.54%)
保存最佳模型,准确率: 77.54%
Epoch 5: 100%|██████████| 391/391 [00:18<00:00, 20.90it/s, Loss=0.586, Acc=79.6]
Test set: Average loss: 0.6776, Accuracy: 7817/10000 (78.17%)
保存最佳模型,准确率: 78.17%
Epoch 6: 100%|██████████| 391/391 [00:19<00:00, 20.45it/s, Loss=0.533, Acc=81.5]
Test set: Average loss: 0.5979, Accuracy: 7910/10000 (79.10%)
保存最佳模型,准确率: 79.10%
Epoch 7: 100%|██████████| 391/391 [00:19<00:00, 20.21it/s, Loss=0.489, Acc=83.1]
Test set: Average loss: 0.5611, Accuracy: 8128/10000 (81.28%)
保存最佳模型,准确率: 81.28%
Epoch 8: 100%|██████████| 391/391 [00:18<00:00, 21.05it/s, Loss=0.457, Acc=84.3]
Test set: Average loss: 0.5402, Accuracy: 8126/10000 (81.26%)
Epoch 9: 100%|██████████| 391/391 [00:18<00:00, 20.72it/s, Loss=0.417, Acc=85.6]
Test set: Average loss: 0.5032, Accuracy: 8280/10000 (82.80%)
保存最佳模型,准确率: 82.80%
Epoch 10: 100%|██████████| 391/391 [00:19<00:00, 19.86it/s, Loss=0.392, Acc=86.4]
Test set: Average loss: 0.4554, Accuracy: 8469/10000 (84.69%)
保存最佳模型,准确率: 84.69%
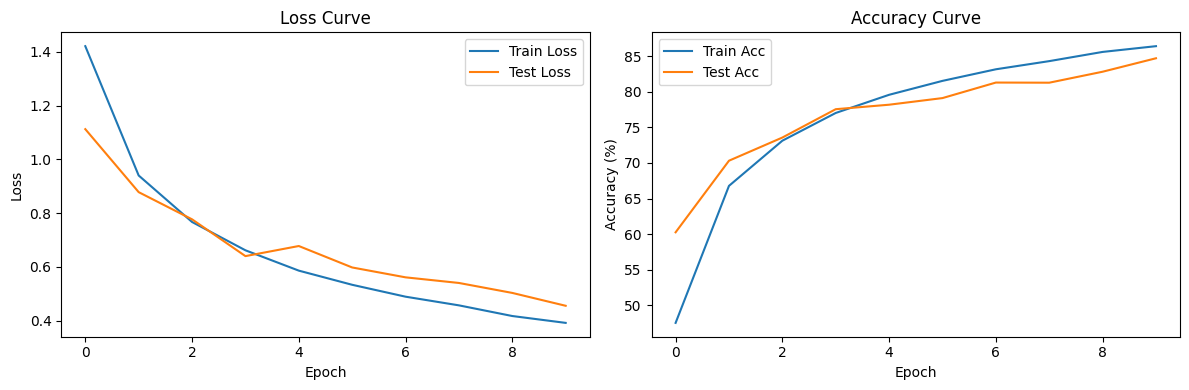
最佳测试准确率: 84.69%
Test set: Average loss: 0.4554, Accuracy: 8469/10000 (84.69%)
加载最佳模型后最终测试准确率: 84.69%
Accuracy of plane : 81.60%
Accuracy of car : 94.10%
Accuracy of bird : 84.20%
Accuracy of cat : 75.60%
Accuracy of deer : 88.10%
Accuracy of dog : 69.50%
Accuracy of frog : 86.50%
Accuracy of horse : 86.60%
Accuracy of ship : 90.80%
Accuracy of truck : 89.90%
实验4:使用ResNet18对CIFAR10分类
ResNet 是如何“保证不退化”的?——不是靠降低学习率,而是结构设计
在学习 ResNet 时,一个非常自然、但又容易被误解的问题是:
如果某一层在当前训练中并没有学到更好的表示,
网络是如何“不退化”、甚至还能继续加深的?
是不是通过降低学习率,牺牲更新幅度来换稳定性?
答案是:不是。
ResNet 的“不退化”并不依赖训练技巧,而是来自网络结构本身。
1. 一个关键误区:不是“保留上一轮训练结果”
很多人(包括我一开始)会下意识地这样理解:
如果这一轮训练没学好,ResNet 会“保留上一次的 shortcut”
但这是不准确的。
ResNet 不涉及时间维度上的“上一轮 / 上一次”,它做的是:
在同一次 forward 中,始终保留当前输入
x本身。
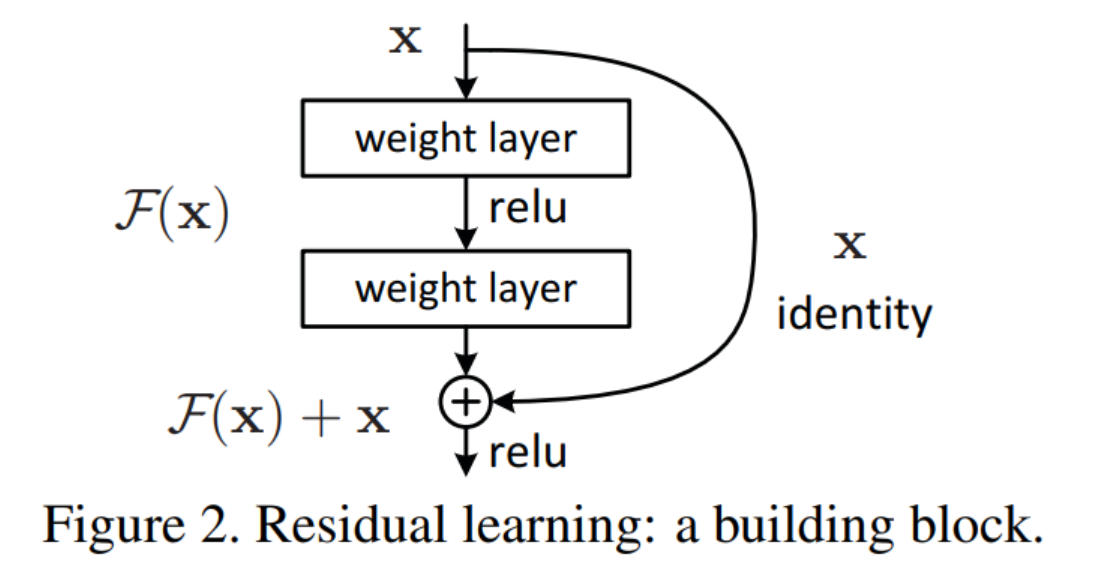
2. ResNet 的核心公式
在残差块中,输出不是直接:
\[H(x) = F(x)\]而是:
\[H(x) = F(x) + x\]其中:
- $x$:当前残差块的输入
- $F(x)$:由若干卷积层学习到的“残差”
shortcut 并不是训练得到的,而是写死在网络结构里的。
3. “不退化”是如何实现的?
3.1 如果这一层什么都没学会
假设由于初始化、梯度或数据原因,这一层的卷积几乎没起作用:
\[F(x) \approx 0\]那么输出就是:
\[H(x) \approx x\]也就是说:
这一层在功能上等价于“恒等映射”
网络变深了,但行为几乎没变。
3.2 对比普通深层网络
普通深层 CNN 中:
\[H(x) = W_2 \sigma(W_1 x)\]如果某一层学不好:
- 权重扰乱表示
- 非线性破坏信息
输出一定会变差,深度反而成为负担。
4. shortcut 的“保底机制”是结构性的
ResNet 的逻辑可以总结为一句话:
“你不管学成什么样,我都把原始输入 x 原样加回来。”
这不是:
- early stopping
- 保存最优权重
- 回滚模型参数
而是前向传播中就已经完成的设计。
5. 从梯度角度看:为什么深层也能训练?
对残差结构求导:
\[H(x) = F(x) + x\] \[\frac{\partial H}{\partial x} = \frac{\partial F}{\partial x} + 1\]这个 +1 极其关键:
- 即使 $\frac{\partial F}{\partial x} \to 0$
- 梯度依然可以通过 shortcut 直接传播
这从根本上缓解了深层网络中的梯度消失问题。
6. 那学习率会不会“变低”?
不会。
- ResNet 不会自动修改学习率
- 学习率调度(Step / Cosine / Warmup)与是否使用残差是正交的
同样的 optimizer 和 learning rate:
- 普通深层 CNN:可能退化或无法收敛
- ResNet:可以稳定训练
7. 真正的“代价”是什么?
虽然 ResNet 不靠降低学习率,但它确实付出了一种代价:
每一层对最终输出的“影响力被削弱了”。
原因在于:
- 参数只存在于 $F(x)$
- 输出始终是 $x + F(x)$
因此:
- 参数更新对输出的影响是“修正项”
- 而不是“完全重写表示”
8. 这是一种“克制而稳定”的学习方式
可以这样理解:
- 普通网络:
每一层都试图“决定一切”
- ResNet:
每一层只负责“微调现有表示”
这使得网络:
- 单层更保守
- 但可以安全地堆叠到非常深
9. 这不是“牺牲速度换稳定”
更准确地说是:
没有 ResNet,深层网络根本学不了;
有了 ResNet,才谈得上速度和表达能力。
这也是为什么后续模型
(Pre-Activation ResNet、DenseNet、Transformer)
几乎全部保留了 residual 结构。
10. 总结
- ResNet 的“不退化”不是靠降低学习率
- 而是通过
\(H(x) = x + F(x)\) 的结构设计 - shortcut 提供了恒等映射与梯度直通路径
- 代价是单层更新更“克制”
- 收益是网络可以无限加深而不崩
ResNet 的本质不是让每一层都变强,
而是允许每一层在“学不好时,选择什么都不做”。
思考问题:
dataloader 里面 shuffle 取不同值有什么区别?
transform 里,取了不同值,这个有什么区别?
epoch 和 batch 的区别?
1x1的卷积和 FC 有什么区别?主要起什么作⽤?
1. DataLoader 里的 shuffle 参数
- 作用:
shuffle=True在每个 epoch 开始时打乱数据顺序。避免模型记住数据顺序,增强泛化能力。
2. Transform 里取不同值
- 作用:用于数据预处理和增强(data augmentation)。
- 不同值的影响:
- 对训练集:
- 可以随机裁剪、旋转、翻转、加噪声等 → 增强数据多样性 → 减少过拟合。
- 对测试集:
- 通常使用固定的 transform(如
Resize+ToTensor+Normalize) → 保证评估一致性。
- 通常使用固定的 transform(如
- 对训练集:
3. Epoch 和 Batch 的区别
- Epoch(轮次)全部训练集数据被模型完整训练一次,称为一个 epoch。
- Batch(批次)一次送入网络训练的数据量。
4. 1x1 卷积 vs 全连接(FC)
- 经过
1x1 卷积后的数据仍然拥有空间二维结构,而经过全连接(FC)的数据是被展平的,没有了空间信息 - 1x1 卷积常用于实现压缩深度/维度/通道数(Depth/Channel)
一些思考: 既然可以通过打散像素的方式,让(图片)数据的信息不能被CNN较为良好地发现和处理,那么是否可以找到
打散像素这一过程的逆过程,使得经过此过程,在后续的卷积以及池化过程中,不直观明显的信息得以展示? 仔细再想一下,这一番过程似乎同样是一种特殊的“卷积”,但是不同于传统矩形的卷积核,如果用卷积核的方式实现这一过程是否会造成效率的降低? 在此之前,值得考虑的是,实际情况中是否真的存在这样的被特定方式打散的图片数据? 而除了图片之外,其他模态的数据信息是否有这样的特性? 总而言之,疑惑点在于,现在认识到的各类卷积核都是矩形的,且相对较小,重要的特征是否都能被找到?